martin
Batch Normalization
这篇是对 bn 使用中个人问题的总结 并不是论文翻译
BatchNorm 是 2015 年由Google 提出,这段时间经常遇到 BN 中问题,以前觉得自己理解了,其实还有很多小细节没有搞懂,因此写一篇详解
Normalization
Normalization是一个统计学中的概念,我们可以叫它归一化或者规范化,它并不是一个完全定义好的数学操作(如加减乘除)。它通过将数据进行偏移和尺度缩放调整,在数据预处理时是非常常见的操作,在网络的中间层如今也很频繁的被使用。
对于图像而言,做法是将每个像素减去图像中所有像素的均值,然后再除以所有像素的标准差,将所有像素值缩放到同一个尺度。归一化的主要目标是提供一种不变性,不变性主要针对的是平均像素强度和对比度的波动,拍摄时的光照强度,图像反射率等会使图片不同区域的像素强度和对比度发生变化,而归一化的目的就是通过尺度缩放弱化这种波动,使得较亮的部分变暗一些,较暗的部分变亮一些。对于大量来自不同分布和来源的图片来说是非常重要的预处理步骤,消除了对比度以及像素强度的波动对特征提取的影响,使得卷积神经网络可以提取稳定的图像特征
详解 BN
深度学习中的 Internal Covariate Shift
深度神经网络模型的训练为什么会很困难?其中一个重要的原因是,深度神经网络涉及到很多层的叠加,而每一层的参数更新会导致上层的输入数据分布发生变化,通过层层叠加,高层的输入分布变化会非常剧烈,这就使得高层需要不断去重新适应底层的参数更新。为了训好模型,我们需要非常谨慎地去设定学习率、初始化权重、以及尽可能细致的参数更新策略。
Google 将这一现象总结为 Internal Covariate Shift,简称 ICS. 什么是 ICS 呢?@魏秀参 在一个回答中做出了一个很好的解释:
大家都知道在统计机器学习中的一个经典假设是“源空间(source domain)和目标空间(target domain)的数据分布(distribution)是一致的”。如果不一致,那么就出现了新的机器学习问题,如 transfer learning / domain adaptation 等。而 covariate shift 就是分布不一致假设之下的一个分支问题,它是指源空间和目标空间的条件概率是一致的,但是其边缘概率不同,即:对所有
\[x \in \chi, P_s(Y|X=x)=P_t(Y|X=x)\]但是
\[P_s(X)\neq P_t(X)\]大家细想便会发现,的确,对于神经网络的各层输出,由于它们经过了层内操作作用,其分布显然与各层对应的输入信号分布不同,而且差异会随着网络深度增大而增大,可是它们所能“指示”的样本标记(label)仍然是不变的,这便符合了covariate shift的定义。由于是对层间信号的分析,也即是“internal”的来由。
ICS 会导致什么问题?
简而言之,每个神经元的输入数据不再是“独立同分布”。
其一,上层参数需要不断适应新的输入数据分布,降低学习速度。
其二,下层输入的变化可能趋向于变大或者变小,导致上层落入饱和区,使得学习过早停止。
其三,每层的更新都会影响到其它层,因此每层的参数更新策略需要尽可能的谨慎。
BN 原理
“对于一个拥有d维的输入x,我们将对它的每一个维度进行标准化处理。” 假设我们输入的x是RGB三通道的彩色图像,那么这里的d就是输入图像的channels即d=3,标准化处理也就是分别对我们的R通道,G通道,B通道进行处理。
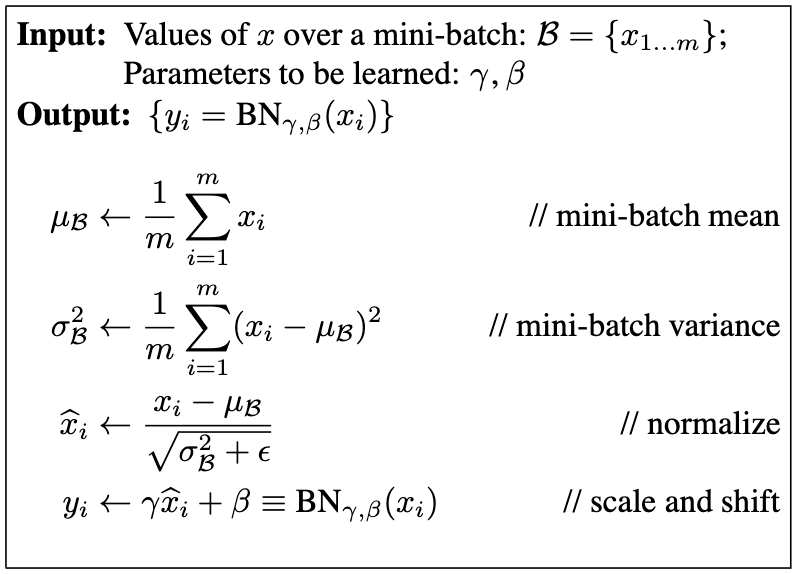
在Normalization完成后,Google的研究员仍对数值稳定性不放心,又加入了两个参数gamma和beta,即 $y^k=\gamma^k \hat{x}^k + \beta^k$, $\gamma$ 是再缩放参数,$\beta$ 是再平移参数,为了保证模型的表达能力不因为规范化而下降, 除了充分利用底层学习的能力,另一方面的重要意义在于保证获得非线性的表达能力。举个例子,在sigmoid激活函数的中间部分,函数近似于一个线性函数(如下图所示),使用BN后会使归一化后的数据仅使用这一段线性的部分,如果只用这一段,那网络就成了线性网络。
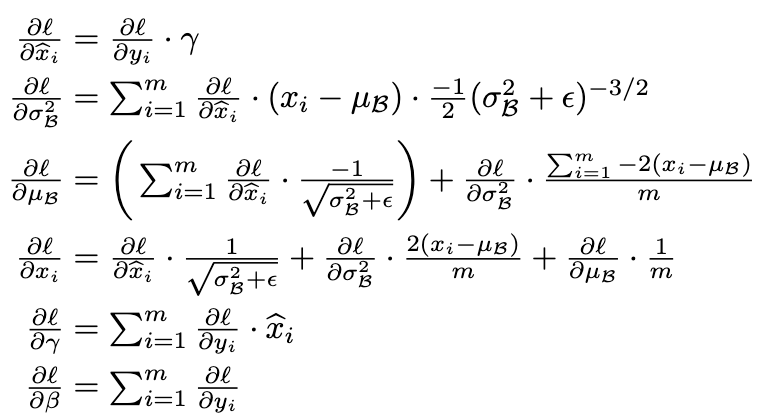
参数的更新,原文也给了公式
pytorch 的 BN 实现解析
CLASS torch.nn.BatchNorm2d(num_features, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
- momentum – the value used for the running_mean and running_var computation. Can be set to
Nonefor cumulative moving average (i.e. simple average). Default: 0.1
This
momentumargument is different from one used in optimizer classes and the conventional notion of momentum. Mathematically, the update rule for running statistics here is $\hat{x}_\text{new} = (1 - \text{momentum}) \times \hat{x} + \text{momentum} \times x_t$ , where $\hat{x}$ is the estimated statistic and $x_t$ is the new observed value.
- track_running_stats – a boolean value that when set to
True, this module tracks the running mean and variance, and when set toFalse, this module does not track such statistics, and initializes statistics buffersrunning_meanandrunning_varasNone. When these buffers areNone, this module always uses batch statistics. in both training and eval modes. Default:True
BatchNorm 默认打开 track_running_stats,因此每次 forward 时都会依据当前 minibatch 的统计量来更新 running_mean 和 running_var。
Pytorch中的BN层的动量平滑和常见的动量法计算方式是相反的, momentum 默认值为 0.1,控制历史统计量与当前 minibatch 在更新 running_mean、running_var 时的相对影响。
$E(x)$ $Var(x)$ 分别表示 $x$ 的均值、方差;需要注意这里统计方差时用了无偏估计,与论文保持一致。
在训练过程中model.train(),train过程的BN的统计数值—均值和方差是通过当前batch数据估计的。
并且测试时,model.eval()后,若track_running_stats=True,模型此刻所使用的统计数据是Running status 中的,即通过指数衰减规则,积累到当前的数值。否则依然使用基于当前batch数据的估计值。
BN 冻结
正确的冻结BN的方式是在模型训练时,把BN单独挑出来,重新设置其状态为eval (在model.train()之后覆盖training状态).
def set_bn_eval(m):
classname = m.__class__.__name__
if classname.find('BatchNorm') != -1:
m.eval()
model.apply(set_bn_eval)
[参考]
详解深度学习中的Normalization,BN/LN/WN - 知乎 (zhihu.com)
深度学习中 Batch Normalization为什么效果好? - 言有三的回答 - 知乎
PyTorch 源码解读之 BN & SyncBN:BN 与 多卡同步 BN 详解 - 知乎 (zhihu.com)